


생명체와 상호 교감이 가능한 초소형 소프트 로봇 개발
의료용 로봇으로 활용 기대 … 사이언스 로보틱스지 게재
댓글 0
기사입력 : 2021.10.14 10:41

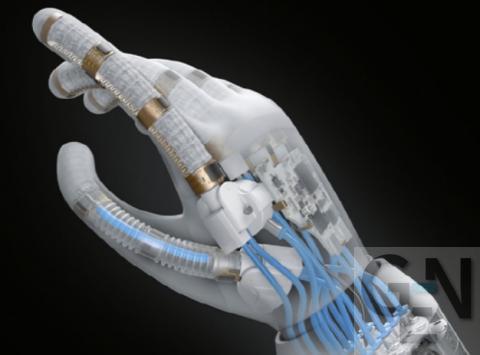
과학기술정보통신부는 한승용·강대식·고제성 교수(아주대학교 자연모사연구실) 연구팀이 사람 손 형상을 닮은 초소형 소프트 로봇(그리퍼)을 개발했다고 밝혔다.
돼지 혈관이나 달팽이 알처럼 조심스럽게 다뤄야 하는 대상을 부드럽게 잡고 맥박이나 심장박동 같은 실시간 생체신호를 측정할 수 있는 다섯 손가락 형상의 초소형 로봇을 개발한 것이다.
과학기술정보통신부 개인기초연구(신진연구) 사업의 지원으로 수행된 본 연구 성과는 로봇 분야 세계최고 권위 학술지인 국제학술지 사이언스 로보틱스(Science Robotics)에 10월 14일 04시(한국시간) 게재되었다.
기존 로봇(그리퍼)은 단순히 대상을 잡기 위한 용도로서 주로 단단한 물질로 만들어져 부드러운 대상을 잡는데 한계가 있었으며, 대상으로부터 신호를 받을 수 있는 센서를 함께 구현하려면 부피가 커져 작은 대상을 잡는데 어려움이 있었다.
이에 연구팀은 경도(단단함)와 연성(부드러움)을 조절할 수 있는 소재(형상기억폴리머)를 채택하여 피부의 성질과 비슷한 기계적 특성을 구현하고, 아주 얇은 은나노선과 레이저 공정을 활용하여 센서의 크기를 줄여 로봇의 크기를 길이 5mm 이하로 줄이는 데 성공했다.
로봇(그리퍼)에 탑재된 센서는 잡고 있는 대상의 미세한 움직임을 측정하고 은나노선을 통해 대상에 열적 자극도 전달할 수 있도록 설계되어 물체로부터의 신호를 모니터링 하는 동시에 자극을 주는 양방향 입출력이 가능하도록 하였다.
실제로 연구팀은 이 로봇을 통해 직경 3mm도 안되는 작고 부드러운 달팽이 알을 터트리지 않고 잡아서 열을 가해 부화시키는데 성공했으며, 부화 과정에서 발생하는 미세한 기계적 움직임을 측정함은 물론, 부화 직후 달팽이의 미세 심장 박동수까지 정확히 측정해냈다.
또한 로봇 자체 무게보다 최대 6,400배 무거운 물체를 순간적으로 들어 올리는 한편 돼지 혈관을 상처 없이 잡아 맥박을 측정하였는데, 이는 ‘마이크로미터 단위의 미세 유기체를 상처 없이 잡아 미세 생체 신호를 측정한 최초의 사례’라고 연구팀은 설명했다.
형상기억폴리머로 만들어진 로봇(소프트 그리퍼)은 강성을 조절(가변 강성)할 수 있어 터지기 쉬운 연어 알을 손상 없이 잡을 뿐만이 아니라 자신보다 1,200배 무거운 추를 지속적으로 들 수 있다.
한승용 교수는 “기존 로봇(그리퍼)은 잡은 대상의 반응만을 측정하지만 이번에 개발한 그리퍼는 측정과 동시에 자극도 줄 수 있어 의료 분야에서 진단 및 치료 과정의 모니터링에 활용 가능할 것”이라며 향후 후속연구를 통해 약물전달, 무선동작 등의 기능을 추가할 예정임을 밝혔고, “현재 많은 난제들이 쌓여있는 사람의 세포 단위 유기체를 기계적으로 상처 없이 잡아 원하는 위치에 고정하여 자극에 대한 반응을 분석 할 수 있는 새로운 플랫폼으로 도전할 계획”이라고 밝혔다.

전체댓글 0
